|
Sundhar Vinodh Sangeetha I'm a Robotics PhD student at Georgia Tech at the Safe Robotics Lab and C3U Lab, advised by Shreyas Kousik and Sarah Li. In the past, I have
Please feel free to email me at ssangeetha3 at gatech dot edu |

|
Research |
|
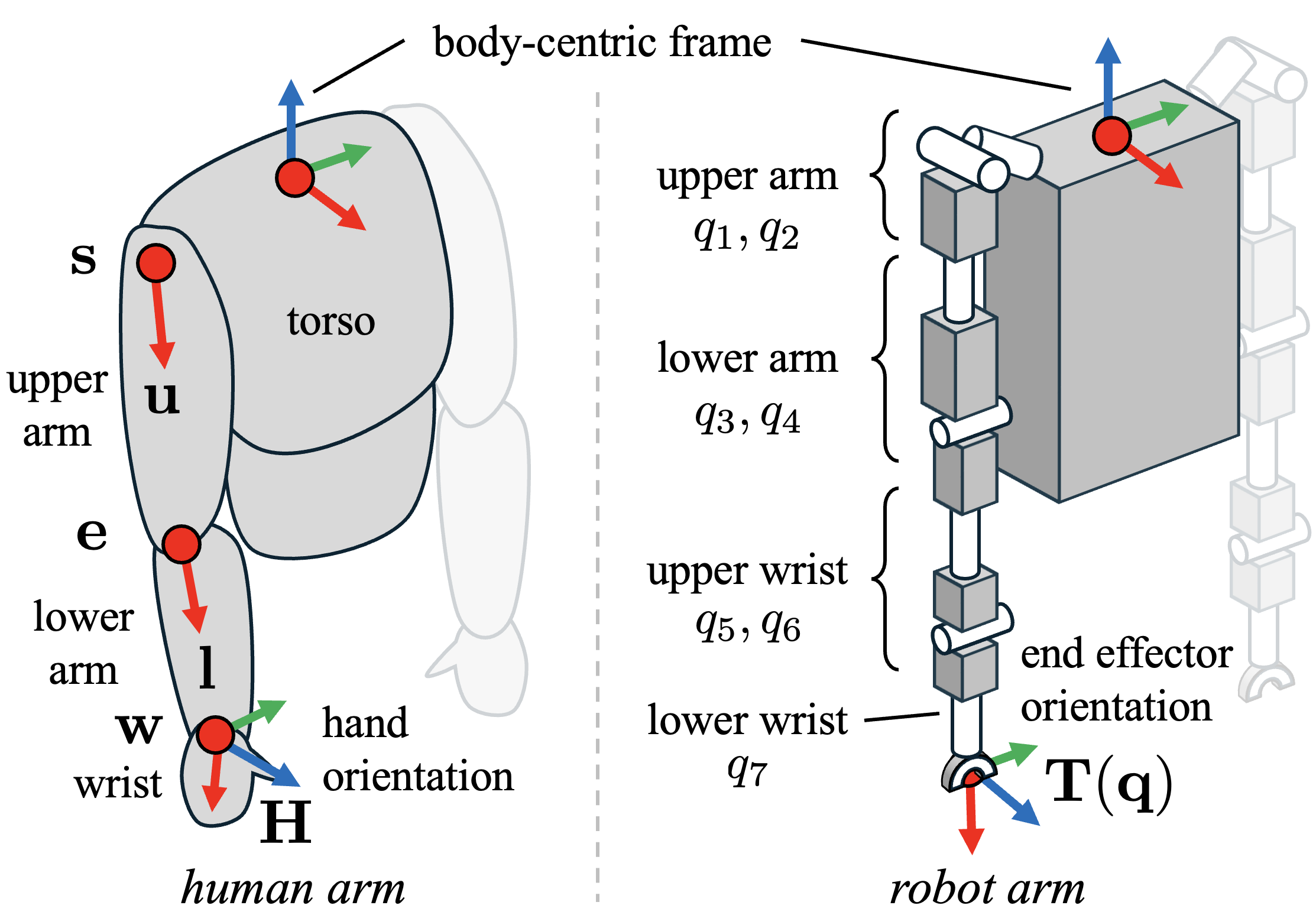
A Closed-Form Geometric Retargeting Solver for Upper Body Humanoid Robot Teleoperation
Chuizheng Kong, et. al. arXiv SEW-Mimic, a fast (3 kHz), closed-form, analytical orientation-alignment method for retargeting human arm motion to 7-DoF humanoid robots using shoulder–elbow–wrist keypoints |
|
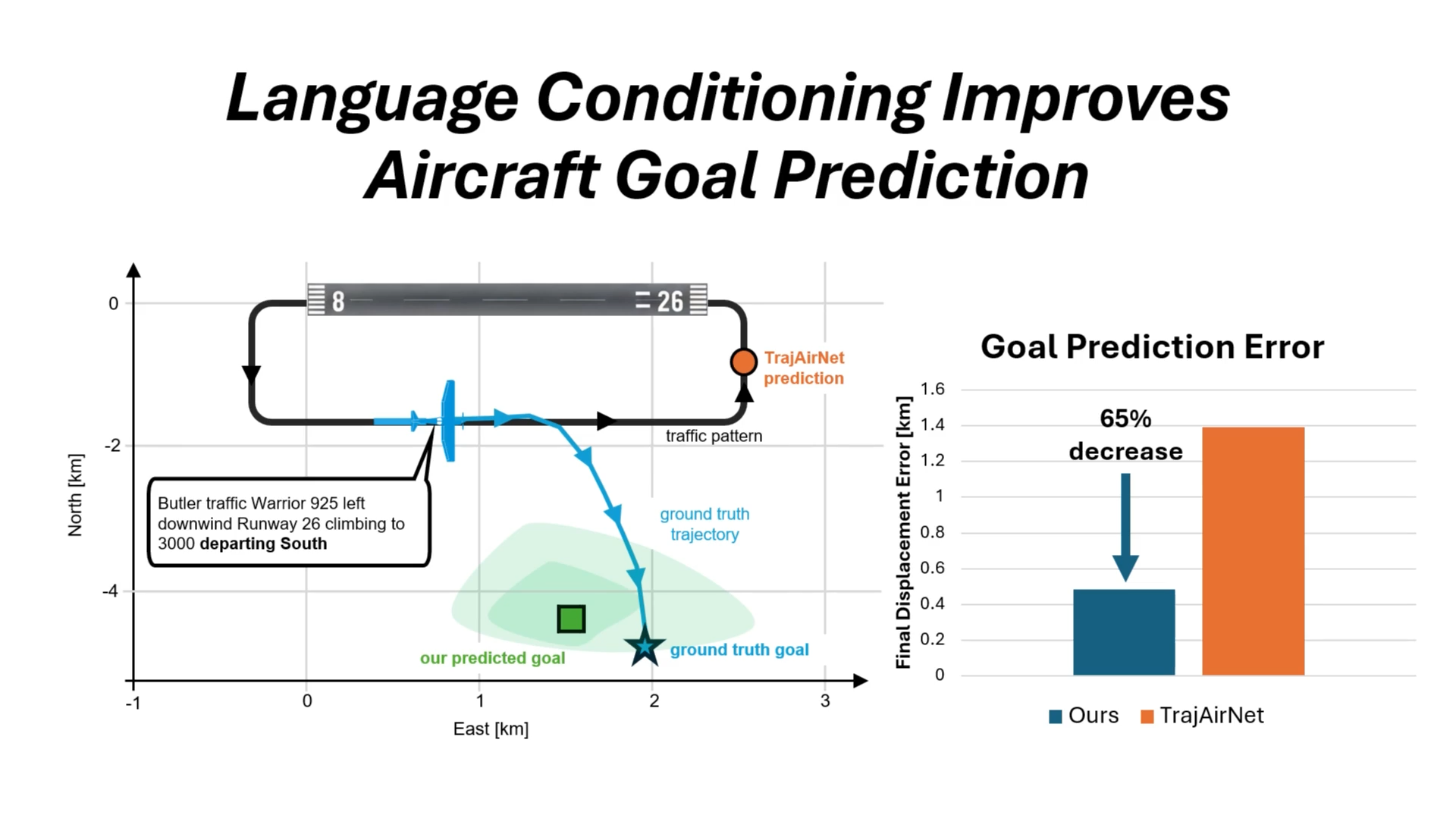
Language Conditioning Improves Aircraft Goal Prediction in Untowered
Airspace
Sundhar Vinodh Sangeetha, Chih-Yuan Chiu, Sarah H.Q. Li*, Shreyas Kousik* (*: Equal Advising) Submitted to ICRA, 2026 project video / arXiv At 90% of airports in the US, pilots talk directly to one another to coordinate, without air traffic control. Using these loosely structured natural language communications to infer spatial goals reduces error by up to 65%. |
|
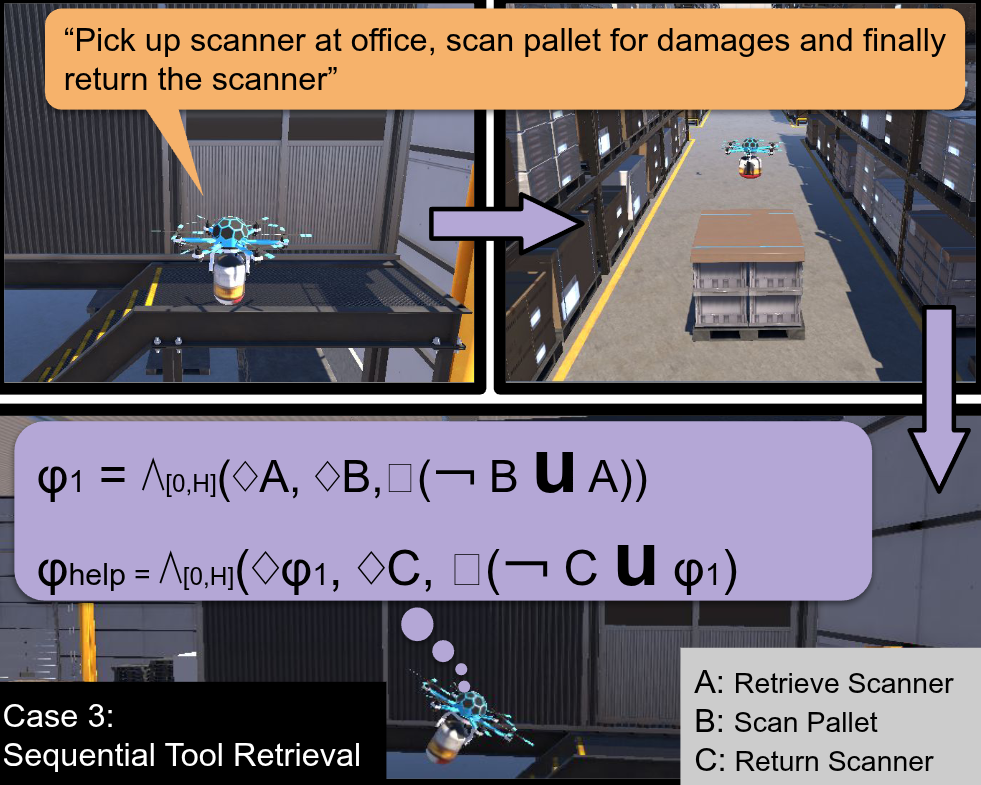
Ask, Reason, Assist: Decentralized Robot Collaboration via Language and
Logic
Dan B.W. Choe, Sundhar Vinodh Sangeetha, Steven Emanuel, Chih-Yuan Chiu, Samuel Coogan, Shreyas Kousik project page / arXiv Enabling warehouse robots to coordinate in natural language and turning this into temporal logic constraints for motion planning allows them to resolve problems autonomously while minimizing disruption to the overall multi-agent system. |
|
Website Template from Jon Barron. |